|
| |||||||||
|
|
| Infrastruktur |
|
Immersive Design Lab
Das Immersive Design Lab (IDL) ist ein interdisziplinäres Labor der ETH Zürich zur Erforschung zukunftsorientierten Designs, Architektur und Bauingenieurwesens. Gramazio Kohler Research der ETH Zürich, initiierte und realisierte das IDL in Zusammenarbeit mit Experten aus den Bereichen Extended Reality und Akustik. Das Labor befindet sich auf dem Hönggerberg Campus der ETH Zürich, im HIT F22. Die Nutzungsaufnahme des IDL ist ab Mai 2021 vorgesehen. 
Robotic Fabrication Laboratory Das Robotic Fabrication Laboratory (RFL) wurde von Gramazio Kohler Research initiiert und entwickelt. Es umfasst eine Multi-Robotik-Anlage, welche auf einem deckenmontierten Portalsystem basiert. Vier kooperierende Industrieroboterarme des Typus ABB IRB 4600 bewegen sich auf einer Linearachse und können dadurch Projekte bis zu einem Volumen von insgesamt 45 x 17 x 6 Metern bearbeiten. Diese Konfiguration erlaubt es, eine grosse Bandbreite an grossmassstäblichen, architektonischen und baukonstruktiven Experimenten durchzuführen. Mit dem Bezug des neuen Arch-Tec-Lab-Gebäudes im Herbst 2016 ging das RFL in Betrieb. 
In situ Fabricator Die on-board Sensorik des Roboters ermöglicht Produktionsprozesse ohne externe Messsysteme. Mithilfe von Kameras am Endeffektor des Roboters können Marker und Tags auf der Baustelle vermessen werden, was der Orientierung des Roboters dient. Für weitere Informationen: In situ Fabricator 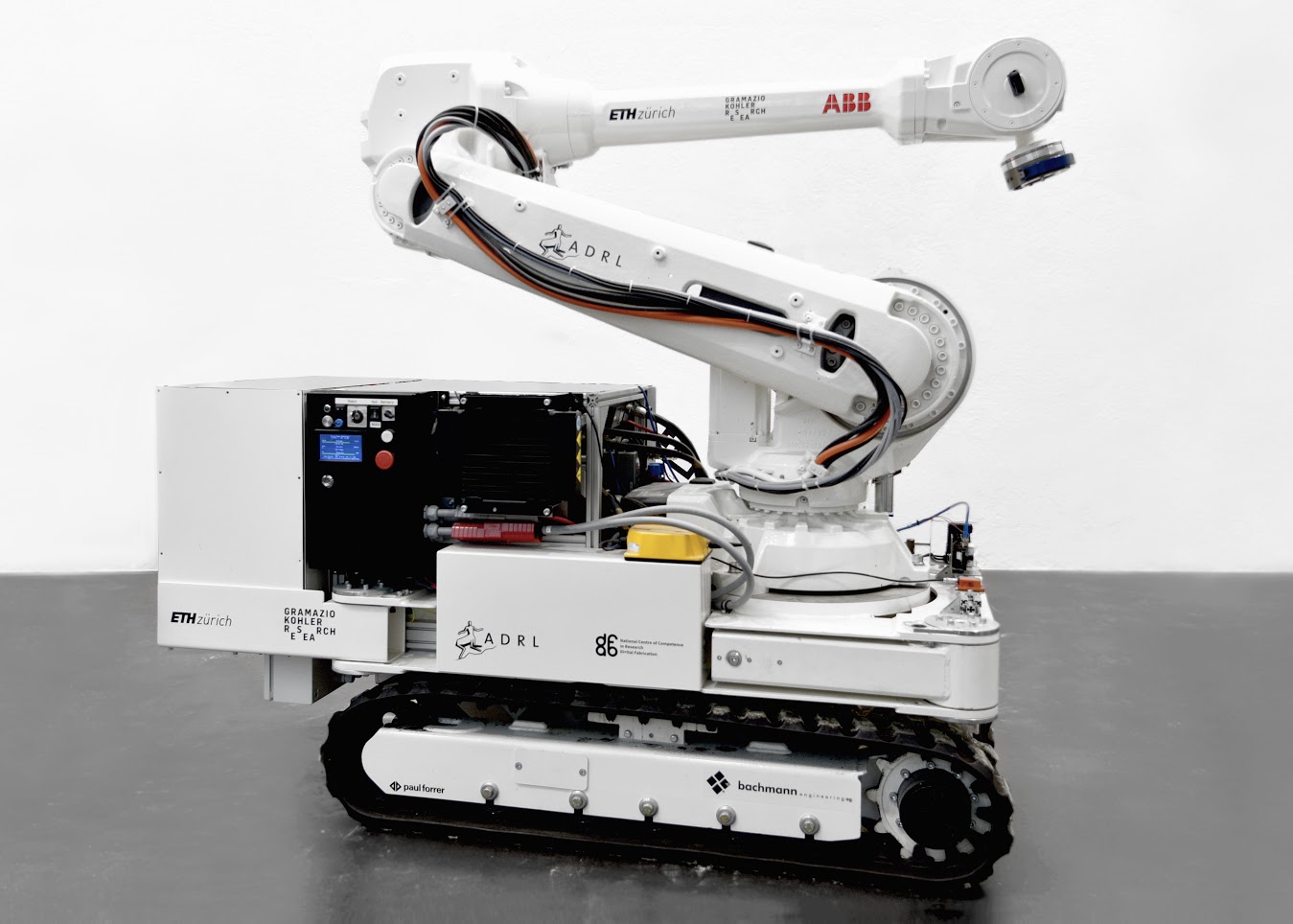
ABB Roboterarme IRB 4600 auf Linearachse IRBT 2005 Zwei Industrieroboterarme des Typus ABB IRB 4600 stehen auf einer Linearachse in den Seitenbereichen des RFL zur Verfügung und können zur Bearbeitung von Projekten eingesetzt werden. Der Arbeitsradius des Roboterarms von 2.5 Metern und die Länge der Achse von 5 Metern ergeben einen Arbeitsbereich von 10 x 5 x 2.5 Metern. Die Traglast umfasst bis zu 40 Kilogramm. Dank des modularen Aufbaus der Linearachse kann eine Verlängerung des Arbeitsbereiches jederzeit vorgenommen werden. Für weitere Informationen: ABB IRB 4600 
Bild: KEYSTONE/Christian Beutler UR10 Roboterarme Vom UR10 Model verfügen wir über drei Exemplare, welche für die Automatisierung von Prozessen und Aufgaben mit einer maximalen Traglast von bis zu 10 Kilogramm eingesetzt werden. Dieser Robotertypus eignet sich insbesondere für Prozesse, bei denen Roboter und Menschen nah zusammenarbeiten. Sein Arbeitsradius beträgt bis zu 1300 Millimeter. Für weitere Informationen: Universal Robots UR10 
UR5 Roboterarme Unsere sechs UR5 Roboterarme werden für Forschungsprojekte im Kontext unseres MAS DFAB Studiengangs eingesetzt. Sie übernehmen die Automatisierung von Aufgaben, die maximal eine Traglast von 5 Kilogramm und eine Reichweite von 850 Millimeter beinhalten. Für weitere Informationen: Universal Robots UR5 
Presse Unsere Zwick Materialprüfmaschine Modell 1484 wird für Zug-, Druck- und Biegversuche eingesetzt und verfügt über folgende technische Spezifikationen: RetroLine tC II, Fmax 200 kN, Prüfraumbreite 630 mm, Traversenhub 2200 mm, Prüfgeschwindigkeit bis 200 mm/min. 3D Drucker Zwei Maschinen des Typs BQ Hephestos 2 stehen für 3D Druckprojekte zur Verfügung. Der Hephestos 2 ist ein Fused Deposition Modeling (FDM) Drucker mit einer maximalen Auflösung von bis zu 0.1 Millimetern. Polylactid (PLA) und flexibles Filament können gedruckt werden, die maximale Grösse der gedruckten Elemente beträgt 210 x 297 x 220 Millimeter. Voxel Jet Als Partikelmaterial für unsere VX1000 kommt Sand zum Einsatz. Ihr Druckkopfsystem erreicht eine Auflösung von bis zu 600 dpi und der Bauraum der Maschine misst 1000 x 600 x 500 Millimeter. |
| Copyright 2023, Gramazio Kohler Research, ETH Zurich, Switzerland | ||
|
| ||
|
Gramazio Kohler Research
Professur für Architektur und Digitale Fabrikation ETH Zürich HIB E 43 Stefano-Franscini Platz 1 / CH-8093 Zürich +41 44 633 49 06 | Follow us on: Vimeo | Instagram | |